フォトグループ
フォトグループのプロパティ
マルチカメラリグ
フォトグループがマルチカメラリグの一部としてカメラデバイスを定義するかどうかを指定します。オプションは「なし」または「主要」です。マルチカメラリグの設定を有効にするには、ブロックのすべてのフォトグループがこれに属する必要があり、設定の要件を満たす必要があります。
カメラモデルタイプ
次の2種類のカメラモデルタイプに対応しています。
ContextCaptureのカメラモデルの詳細については、doc/ContextCapture camera model.pdfを参照してください。
カメラモデルバンド
次の2種類のカメラモデルバンドに対応しています。
センサーサイズ
ContextCaptureでは、カメラのセンサーサイズ、特にセンサーの長辺の長さが必要になることがあります。ご使用のカメラモデルがContextCaptureのカメラデータベースにまだない場合、センサーサイズの入力が必要になります。カメラの詳細がわからなければ、Digital Photography ReviewのWebサイトで確認するか、Bentley Systemsの技術サポートへお問い合わせください。
焦点距離
新規作成されたフォトグループでは、ContextCaptureは、EXIF情報から焦点距離をおおまかに推定します。そうでない場合、初期値の入力を求められます。その後、ContextCaptureは空中三角測量によって、より正確な焦点距離を自動推定します。
フォトグループごとにセンサーサイズおよび焦点距離を指定することをお勧めします。これらのプロパティが指定されていない場合、ContextCaptureは35mmセンサーサイズ相当の焦点距離を50mmに等しいものと想定します。正しい焦点距離が大きく異なる場合、空中三角測量は失敗する可能性があります。このような場合は、カメラの初期プロパティを手動で指定する必要があります。
カメラモデルが魚眼の場合、魚眼焦点マトリックスが定義されると焦点距離は無視されるようになります(次を参照)。
魚眼焦点マトリックス
カメラモデルタイプが魚眼の場合は、非対称の魚眼焦点をモデル化するために、焦点距離ではなく魚眼焦点マトリックスが使用されます。
カメラモデルがパースペクティブの場合は使用されません。
プリンシパルポイント
新規作成されたフォトグループでは、ContextCaptureはプリンシパルポイントを画像の中心に初期設定した上で、空中三角測量によって、より正確なプリンシパルポイントを自動推定します。
ディストーション
新規作成されたフォトグループでは、ContextCaptureは標準でレンズディストーションはないものとして扱いますが、その後、空中三角測量によってさらに正確なレンズディストーションを自動推定できます。
カメラモデルが魚眼の場合は使用されません。
魚眼ディストーション
カメラモデルが魚眼の場合のディストーションモデル。
カメラモデルがパースペクティブの場合は使用されません。
アスペクト比/スキュー
ピクセルが正方形でない場合に使用されるプロパティです。
フォトグループの操作
カメラデータベースからの取得/カメラデータベースへの追加
フォトグループのカメラモデルをカメラデータベースに追加したり、カメラデータベースから取得したりすることができます。
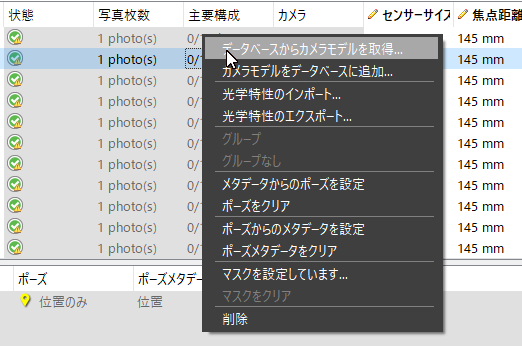
「カメラデータベース」も参照してください。
光学特性のエクスポート/インポート
フォトグループのプロパティ(センサーサイズ、焦点距離、ディストーション、プリンシパルポイントなど)をOPTファイルにエクスポートしたり、OPTファイルから再インポートしたりすることができます。
この機能を使用すると、カメラのキャリブレーションを再利用することができます。
光学特性をインポートまたはエクスポートするには、フォトグループを右クリックして、コンテキストメニューから「光学特性をエクスポート」または「光学特性をインポート」を選択します。
フォトグループの解除とグループ化
特定の場合においては、カメラの内部標定は写真ごとに個別に推定されます。たとえば、写真がカメラリグで撮影された場合や、またはズームレンズを使用したりして焦点距離が写真ごとに微妙に異なっている場合などです。
そのようなケースでは、ContextCaptureで写真を追加する前にデータセットを用意することをお勧めします。フォトグループに関する全般的な推奨事項を確認し、各写真を異なるサブディレクトリに配置します。ただし、写真をそのままで追加して「グループなし」機能を使用することも可能です。その場合は、テーブル上のフォトグループをすべて選択して、右クリックで「グループなし」を選択すると、1枚につき1つのフォトグループとなります。
「画像データセットの準備」も参照してください。